
.
Video mit Ton: gyro-gleiter.avi
19 sek 1,54 MB
.
.
|
. . angelehnt an das Goddard'sche Prinzip, was ich in einer TV-Sendung sah. Es gab Mitte der Achtziger auch keine elektrischen 2-Achs-Gyrosysteme für Modelle, erst recht wären elektrische Systeme natürlich viel zu schwer gewesen - so entschied ich mich also zur Entwicklung eines mechanischen 2-Achs-Gyrosystems. Hierbei hängt ein Bleigewicht im Inneren des Rumpfes und steuert
über seine
Somit also am Ende die Frage, mit welcher Sensibilität und mit
welcher
|
|
. Zunächst entstand ein Gleiter, mit einer Spannweite von etwa 30 cm, der das Gyrosytem im Freiflug ohne Motorisierung testen sollte. In der Mitte des offenen Gitterrumpfes befand sich unter einer kleinen,
Da Haupt- und Vorflügel aus einfacher, flacher Pappe bestanden,
Die Frage war desweiteren, in wie weit das Modell auf Schwerpunktver-
Für eine Phantasie-Konstruktion flog dieses Modell jedoch auf Anhieb
Abgeworfen wurde vom vierten Stock der Bremer Universität-Zentralbereich.
|
.
Video mit Ton: gyro-gleiter.avi
19 sek 1,54 MB
.
.
|
. Als Titan-Rakete bezeichnete ich alle Modelle mit 4 Fins. Jede Leitwerks-Flosse hatte eine angesteuerte Klappe. Das System lief einwandfrei - im Clip nicht so zu erkennen / zu demonstrieren gewesen, da beim Drehen mit den Händen die Fäden mit den Fingern eingeklemmt wurden. Auch ist die ganz extreme Waagerechte ansteuerungstechnisch bereits etwas heikel - aber genau dazu sollte es im Fluge ja gar nicht erst kommen. Die Screenshots zeigen das Prinzip und sprechen für sich.
|


.
|
|
|
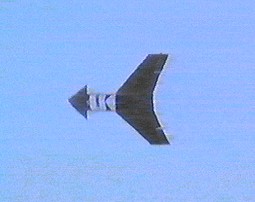
Ein ambitioniertes Modell, ausgerüstet
mit dem Gyrosystem. Hier wurde
Länge 50cm, Gewicht 130g
Die Fluglage war eigentlich stabil, jedoch war das
Modell wohl zu hecklastig
See, what happens:
Video: x15-demo.avi
12 sek 691 KB
|
